Každý výrobca potrebuje pre udržanie svojej spoločnosti zákazníkov, vďaka ktorým je dopyt po jeho produktoch. Nedostatok zákazníkov spôsobuje problémy, ktoré si musí každá spoločnosť vyriešiť svojim spôsobom, či už úpravou marketingu, zamerania, alebo expandovaním. Ale čo v prípade, keď je zákazníkov veľa? Mnoho firiem by odpovedalo „kiežby bolo“, no v určitých zameraniach, bez ktorých sa priemysel nezaobíde, či to už je automotive, alebo spracovávanie kovov, polotovarov, alebo potravín tento problém môže veľmi reálne nastať.
Pre príklad spracovávanie kovov, výroba súčiastok pomocou CNC – tieto spoločnosti majú zaručene dostatok práce, keďže ich výrobky sa používajú naprieč celým spektrom priemyslu. V prípade, že dopyt po produktoch vzrastie do takej miery, že prevyšuje kapacity produkcie, je nutné rozšíriť svoju produktu, alebo navýšiť objemy. No problém nastáva pokiaľ bottleneck nie sú výrobné zariadenia
Personálny nedostatok
Najväčším problémom v poslednej dobe v mnohých závodoch je absencia personálu. Či už sa jedná o vysoko, alebo menej kvalifikovaných ľudí, nájsť kvalitných zamestnancov býva obtiažne. O to väčší problém to začína byť, keď kvôli nedostatočnému personálnemu obsadeniu nie je možné spĺňať existujúce zákazky načas, alebo prijímať ďalšie, väčšie a tým nechať spoločnosť rozrastať.
Automatizácia
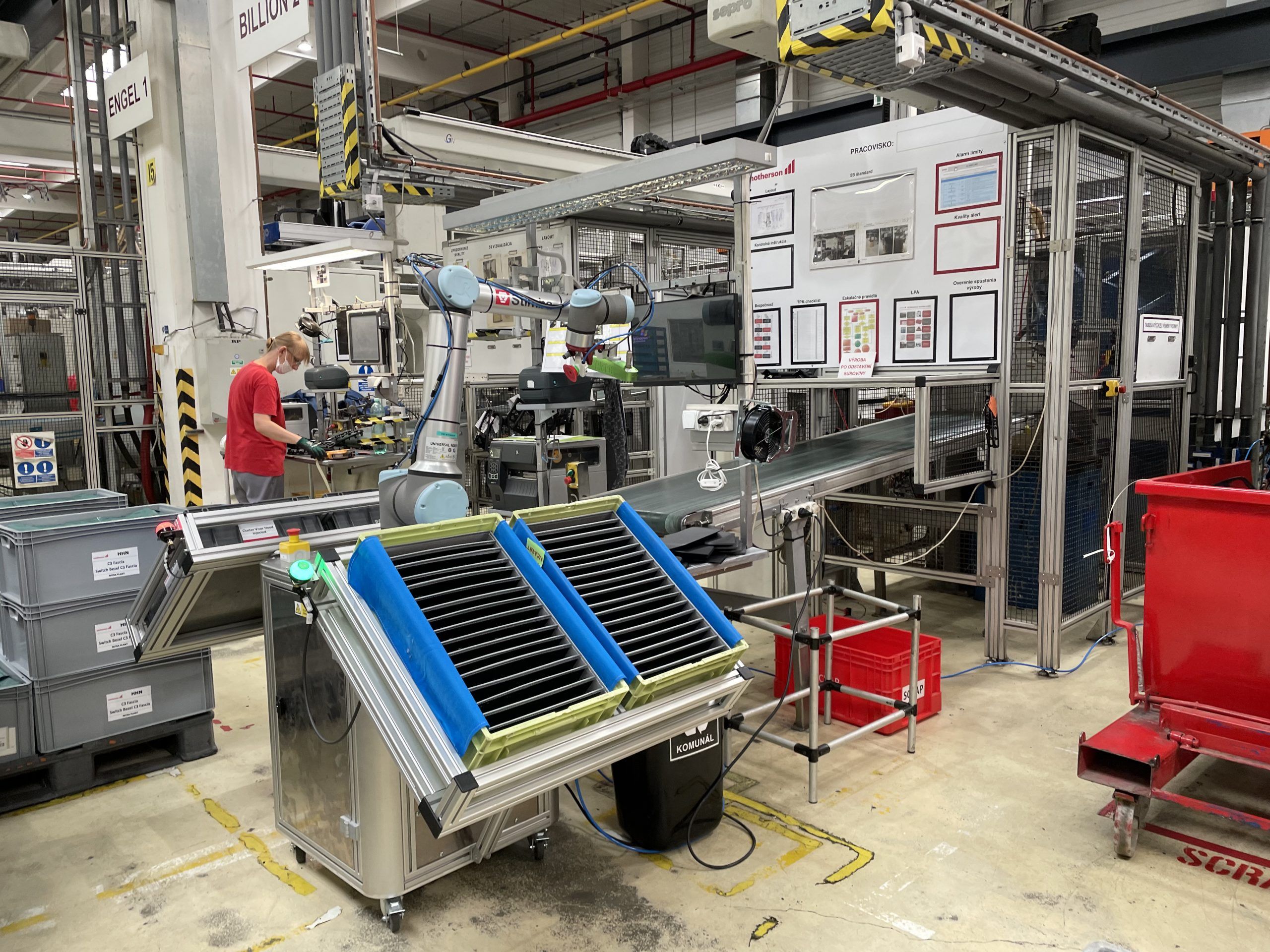
Práve horeuvedené problémy vedú veľa spoločností k hľadaniu riešení pokročilými metódami, ako napríklad automatizovaním výrobného procesu. V prvom kroku je nutné analyzovať výrobný proces. V prípade, že sa jedná o obsluhu CNC, je to zvolenie si vhodného produktu, často toho, ktorý sa vyrába opakovane, či už malosériovo, alebo hromadne. V druhom prípade, to môže byť produkt, ktorý často spôsobuje prestoje, prípadne iné komplikácie tak, aby bolo možné tento najkritickejší produkt výroby zefektívniť.

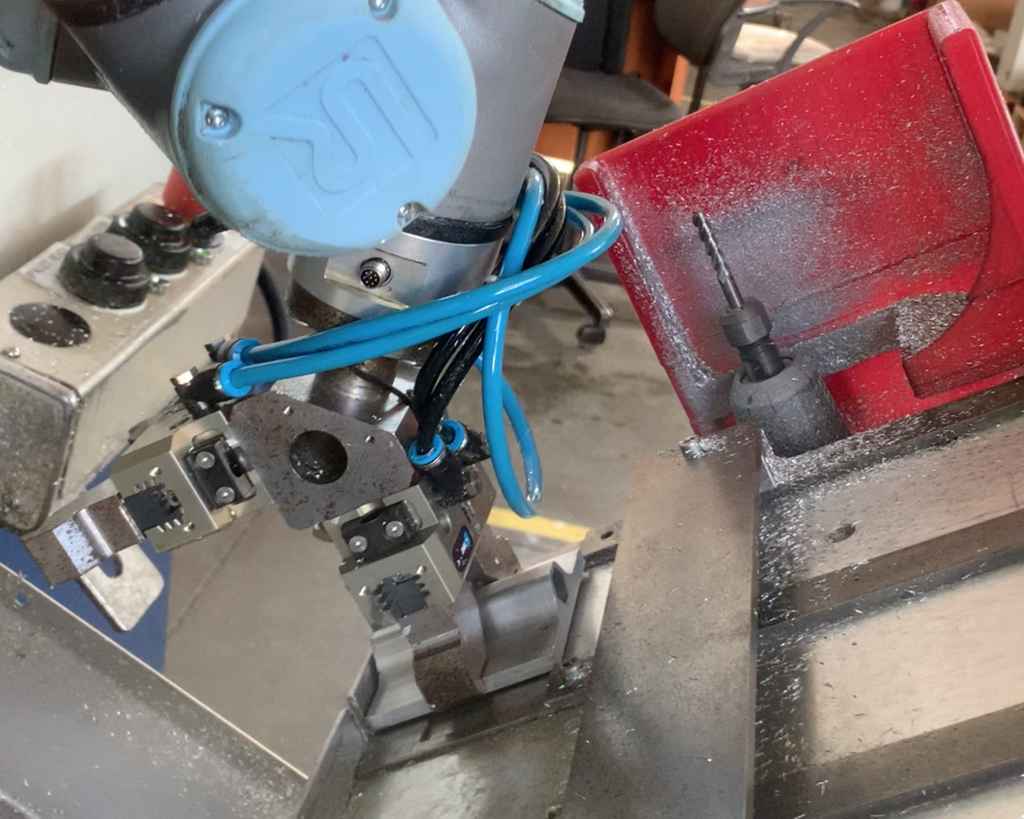
Cobot dokáže veľmi efektívne, presne a spoľahlivo odoberať kusy a upínať do CNC. V závislosti od zvoleného produktu je navrhnutý veľmi presný gripper, vďaka ktorému sa zabezpečí 100%-ná opakovateľnosť. Práve tá býva požiadavkou výrobných riaditeľov, aby mali istotu, že ku Cobotovi nebude musieť niekto „neustále chodiť“ a spúšťať, upravovať a podobne.
Prepojiteľnosť s výrobným zariadením
Komunikácia je veľmi dôležitý element celého výrobného procesu na to, aby sa zabezpečila jeho spoľahlivosť. Prepojenie môže byť riešené buď priamo, kde pomocou PLC komunikujeme s I/O rozhraním oboch strojov a čakáme na pokyny vloženia, odobratia a podobne, kde pomocou kontrolných mechanizmov je možné zabezpečiť, že vštky pohyby budú 100%-ne bezpečné a vykonávané len vtedy, keď na ne príde pokyn.
Druhým spôsobom je neprepojenie robotického pracoviska s výrobným zariadením, ale riešiť ho ako samostatnú bunku. V tomto prípade bude zabezpečené len základné prepojenie na výzvy ako ukončenie cyklu, no aj toto je možné nastaviť časovačom bez akéhokoľvek prepojenia so strojom. Robot následne stláča tlačidlá pomocou grippera rovnako ako človek. Výhodou tohto riešenia je, že robotická bunka bude bež akéhokoľvek káblového spojenia a je možné ho veľmi rýchlo presunúť napríklad k inému zariadeniu.
Tento typ realizácie sme už v minulosti aplikovali, viac o tom si môžete prečítať v sekcii Riešenia.
Spoľahlivosť
V dnešnej dobe sú Coboty, programy a rozhrania veľmi pokrokové a sofistikované dostatočne, aby neslúžili len ako „šou pre manažérov“, ale aby dokázali dokazovať stanované výsledky a prekonávať očakávania. V prípade, že by nejaký problém aj nastal, integrátori často ponúkajú možnosť vzdialeného sledovania a manažmentu zariadenia, čo zahŕňa ovládanie robota prepisovanie jeho programu, preto je možné zmeny vykonať veľmi rýchlo aj na diaľku.
Nočná zmena automatizovane
V prípadovej štúdii americkej spoločnosti ZAGO publikovali svoju aplikáciu Cobota do výroby, vďaka ktorej bolo možné zvýšiť produktivitu, kde pracuje 18 hodín denne, vďaka čomu je jeho návratnosť približne 1 rok.
„Keď už bola robotická bunka vo výrobe, cieľom bolo zabezpečiť jej úplnú spoľahlivosť, aby sa konečne mohla uskutočniť nočná zmena bez obsluhy, ktorú si želali mať už nejaký čas. „Spočiatku sa obávali, že to bude naozaj komplikované, ale vďaka monitorovaciemu softvéru Insights od spoločnosti Robotiq mohli buď zamestnanci spoločnosti, alebo integrátori získať prístup k robotovi na diaľku a priebežne vykonávať zmeny v programe.“
Na záver prikladáme video z našej ďalšej realizácie, ako dôkaz toho, že vždy je možné sa posúvať v možnostiach aplikácií ďalej – v tomto prípade to je obsluha CNC a zároveň odihlovanie. Ani toto nemusí byť všetko, všetko závisí len od možností, požiadaviek a procesu, najbližšie to môže byť práve u Vás, kde bude okrem iného Cobot s Vašimi zamestnancami debatovať 🙂