Leštenie a brúsenie robotom bez programovania s 3D kamerou, umelou inteligenciou a aktívnym prítlakom
Najnovšia generácia pokročilých kolaboratívnych robotov už funguje aj bez programovania. Intuitívne ako na tablete. Aj pre častú zmenu sortimentu. Ready-made riešenie s pokročilým riadením. Odpadajú tak zdĺhavé úlohy programovania zložitých tvarov.
Cenovo dostupnejšie leštenie, presunuteľné riešenie kobotom
Rýchlosť integrácie takýchto riešení je podstatne kratšia ako pri priemyselnej robotike, bunky sú presunuteľné a cenovo dostupnejšie pri porovnateľných výsledkoch. Pripravíme custom riešenie pre Vaše potreby. Použijeme však preto odladenú platformu Nordbo Craftmate
Aktívna kompenzácia prítlaku Nordbo
Pre dosiahnutie najlepších výsledkov nestačia bežné pasívne pasívne pneumatické kompenzácie prítlačnej sily. A pri zložitých povrchov ani silové senzory.
Nordbo robotics preto vyvinuli aktívny elektro-pneumatický systém kompenzácie prítlaku. Tento extrémne rýchlo vyhodnocuje stav pohybu po povrchu, kompenzuje gravitačné zaťaženie nástroja. Dokáže tak plynule pracovať na hranách, „dole hlavou“, či neustále prechádzať z vertikálnych do horizontálnych polôh. Pri zachovaní konštantnej prítlačnej sily. Miera kompenzácie je až do 40mm.
https://youtu.be/fQ13WDCZwLI?t=5
obrusovanie zvarov s pomocou orbitálnej brúsky a aktívnej kompenzácie prítlaku Nordbo
Stimba je distribútorom a partnerom Nordbo. Viac info o Nordbo robotics riešeniach na www.nordbo-robotics.com
3M je svetový líder v abrazívnych materiálov. Pri odlaďovaní aplikácie môžete využiť expertné znalosti 3M pri nastavení procesu. Najčastejšie sa snažíme spolu s klientom analyzovať súčasný stav a dosiahnuť jeho zlepšenie.
Universal robots UR10e a 7.os Ewellix
Všetky komponenty Nordbo sú dokonale zintegrované s najrozšírenejšou platformou cobotov Universal robots. Pre skenovanie a následné opracovanie veľkých plôch a konštrukcii používame pojazd – takzvanú siedmu os robota. V prípade UR10e táto dokonale a intuitívne funguje s robotom.
Ready-made robotická bunka pre vstrekolisy a ukladanie plastových dielov s UR10e a Pickit3D
Moico je cobot určený pre injection molding. V Stimba nasadzujeme coboty s 3D kamerami Pickit3D k vstrekolisom od roku 2018. Každú aplikáciu pripravíme na vybranú rodinu výliskov a spôsob ukladania.
Premiestniteľné riešenie pri vstrekolisy | kolaboratívna obsluha
Väčšina vstrekolisov vo firmách má síce implementovaného jednoduchého robota, avšak ten ukladá diely len na dopravníkový pás.
Moico by Stimba | Ukážka aplikácie s Universal robots UR10e, Pickit 3D, plochými a tvarovanými plastovými dielmi | pre vstrekolisy
Obsluha musí diely často označiť, skontrolovať, niekedy ešte osadiť pinmi a podobne. Mnoho dielov je však určených na intralogistiku a ďalšie úkony ako lakovanie, či montáž. Tieto diely môže pohodlne odoberať a ukladať do balenia kolaboratívny robot s 3D kamerou.
Robotické odoberanie lesklých plochých čiernych dielov v 3D priestore s Pickit3D | vstrekolisy | obsluha plastikárenských strojov
Bunky sú presunuteľné od jedného pásu k druhému a fungujú autonómne bez kalibrácie, prepájania so vstrekolismi.
Integrované riešenie mnohých prevádzkových situácii
Mnoho prevádzkových situácii ako sú odlesky zo svetiel a svetlíkov sú vyriešené rôznymi uhlami snímania, či kontrastnými podložkami na stoloch.
Ukladanie plastových dielov kolaboratívnym robotom UR10e s Pickit 3D a OnRobot RG2 gripprom do KLT
Moico sa po nechcenom náraze do predmetov, či obsluhy hneď zastaví a sám zreferuje. V prípade nutnosti reštartu sa sám zorientuje v priestore a automaticky zaujme východziu polohu.
Ukladanie dielov do 4 KLT, Eco Pack, prípadne do stojanov
Bunku štandardne dodávame vo vyhotovení pre 4 KLT, takže poskytne zásobu pre ľavé aj pravé diely.
Moico je presunuteľná robotická bunka. Jednoducho prisuniete k stolu za dopravníkovým pásom a Moico zakladá diely do KLT.
Výlisky je možné ukladať do prázdnych KLT alebo s pevnými textilnými vložkami ako na videu. V Stimba máme skúsenosti s pokročilou paletizáciou krabíc s naším Palco cobotom. https://www.stimba.sk/paletizacny-cobot-palco-v-hopi-skusobna-prevadzka/
Preto ponúkame aj vyhotovenie pre EcoPack alebo neštandardné balenia (napríklad stojany), vrátane ukladania preložiek.
Riešenie ďalších procesov a kontrola dielov s AI
Ako doplnkové technológie môžu byť použité rôzne spôsoby označovania dielov razítkami, laserom, či nálepkami.
Pokročilejšie a komplexné aplikácie môžu použiť pokročilé technológie kontroly kvality s podporou umelej inteligencie. V tomto prípade pooužíva dodatočnú kameru. Softvéru ukážete niekoľko desiatok OK a NG produktov. AI sa naučí identifikovať chyby, stále sa učí a čoraz spoľahlivejšie rozpoznáva nedostreky, prestreky, pomaranče, škrabance, prachové častice a podobne.
Konečné riešenie závisí aj od miery potrebného detailu, veľkosti a typu plochy, či cyklového času k dispozícii. Pre veľmi detailnú kontrolu používame okrem AI softvéru aj kamery s vysokým rozlíšením štruktúrované osvetlenie, či vysokovýkonné priemyselné počítače. T.j. môžeme pripraviť riešenia s 2 Mpx kamerou aj 20Mpx kamerou.
Využitie umelej inteligencie s Pekat Vision pre detekciu OK a NG dielov
Leštenie, brúsenie, odihlovanie cobotom
Pre post procesing využívame technológie pre odstránenie zvyšného materiálu po vtokoch, či brúsenie a leštenie plôch a skrutkovanie. Tieto môže kvôli cyklovému času vykonávať druhý kolaboratívny robot.
Nordbo robotics riešenie intuitívneho učenia dráh s 3D kamerou s umelou inteligenciou a aktívnym prítlakom
Kamery Pickit3D – intuitívny interface, spoľahlivosť a robustnosť riešenia
Pickit3D patrí medzi lídrov v 3D vision. Medzi výhody patrí do detailu prepracovaný intuitívny interface, možnosť učiť nové diely nielen pomocou CAD ale aj vytvorením 3D snímok, či použitím umelej inteligencie pri rozpoznvaní špecifických clustrov. www.pickit3D.com
Mobilné riešenie s fixnou 3D kamerou Pickit3D, prepolohovaním na 3D slideri a ukladaním 2 dielov do každého okienka.
Aplikácie klipov v automotive
Spolupracujeme s výrobcom technológie identifikácie a triedenia klipov najnovšej generácie. Pracuje na základe vibračných dosiek a presnej identifikácie kamerovým systémom. Dosahuje sa tak podstatne vyššia spoľahlivosť a životnosť riešenia ako pri klasických vibrákoch. Okrem toho je riešenie univerzálne a dokonca umožňuje triediť až 3 typy klipov, alebo dielov naraz vo veľkosti od 1mm až teoreticky do 300mm.
Identifikácia a nasadenie klipov robotom. Podľa možností cyklového času riešené pomocou Moico, alebo druhého robota
Plasty | vstrekolis | ukladanie výliskov do boxu s Universal robots UR10e a Pickit3D
Zadanie: Vstrekolis s dopravníkom a pracovným stolom. 2 výrobky každých 35 sekúnd. Dodať kolaboratívneho robota, ktorý po prisunutí k dopravníku presne zakladá kusy do KLT balení. Je vhodný na pristavenie k rôznym vstrekolisom.
Problém: Dopravník a stôl sú určené pre manuálnu obsluhu. Odstrániť potrebu kalibrácie robota, či kamery. Zakladať kusy pomerne presne do boxov. Jednoduchá obsluha, spustenie a inštalácia.
Riešenie a popis aplikácie: Stimba aplikácia. Kolaboratívna robotika dokáže otvoriť nové možnosti pri obsluhe vstrekolisov. V tomto, u automotive zákazníka, realizovanom riešení (zábery z odlaďovania) je Universal robots UR10e upevnený na na voľne prisunutej pri existujúcom dopravníku so stolom. Robota stačí umiestniť blízko pásu a zapnúť. 3D kamerový systém Pickit3D netreba kalibrovať a sám nájde výrobky v 3D priestore.
Takt výroby s kolaboratívnym robotom
Universal robots UR10e ukladá nepohľadové diely do prepravných boxov. Takt výroby je 2ks naraz každých 35 sekúnd.Takt zakladanie sme nastavili na cca 16 sekúnd / kus. Diely sú uložené v prepravke tesne pri sebe, zapadajú do seba a vytvárajú oblúkový komín pri ukladaní. Pri nepresnom ukladaní dochádza k vzpriečeniu dielov a nedostatku miesta v boxe.
Presunuteľný robot Universal robots UR10e s 3D kamerou Pickit3D
Rozpoznávanie dielov zo vstrekolisu s 3D kamerou
Používame 3D kamerový systém Pickit 3D. Pickit3D mimo iné umožňuje odoberanie dielov bez kalibrácie systému. Sníma polohu a orientáciu objektov v priestore, vie ich oddeliť od pozadia a podobne. Jednoducho nahráme CAD model, alebo si diel 3D „odfotíme“. Po pár klikoch funguje. Super zážitok a intuitívna funkcionalita.
To znamená – podstavu s kolaboratívnym robotom môžeme prisunúť voľne k stolu, či dopravníku. Systém rozpozná po spustení v priestore výrobok a vykoná paletizačný / zakladací program bez kalibrácie prostredia.
3D kamera Pickit3D
Kolaboratívny uchopovač OnRobot RG2
Gripper OnRobot RG2 umožňuje citlivé nastavenie upínacích síl tak, aby bol bezpečný pre obsluhu. Má integrované odmeriavania šírky upnutia, takže je možná kontrola, či má kus upnutý, alebo nie. Je ho zároveň možné použiť buď pre odoberanie iných dielov, či pomocné úkony.
kolaboratívny gripper OnRobot RG2 (1. generácia)
Voľne presunuteľná robotická bunka
V priebehu pár chvíľ je tak možné zmeniť manuálnu obsluhu za obsluhu robotom pri ktoromkoľvek vstrekolise. Samozrejme s vopred zoradenou výrobou.
V tejto aplikácii už prediktívne riešime elimináciu viacerých možných chýb.
Napríklad odoberanie viacerých kusov zo stola, ak došlo k nezhodnej situácii. Prepolohovanie kusu pre presné zakladanie v oranžovom slidery, ak by došlo k nie presnému vyhodnoteniu miesta odobratia kamerou a podobe.
kolaboratívny gripper OnRobot RG2 (1. generácia)
Ďalšie možnosti aplikácie kobotov v plastikárskom priemysle
Medzi ďalšie oblasti vhodné pre daný typ cobota v plastikárskom priemysle patria:
vyberanie dielov zo vstrekolisu
kontrola kvality s 2D kamerou, alebo 3D líniovým laserovým skenerom
Bauer Gear Motor je popredný svetový výrobca motorov a prevodoviek (automatizácia v automotive, využitie v bielej technike,…) so závodom v Zlatých Moravciach. Výroba pastorkov a ozubených kolies je pomerne náročná strojárska výroba s toleranciami v tisícinách milimetra. Výrobný proces musí byť dokonale odladený. Najmenšia chybička ústi do nezhodnej výroby.
Bauer | obsluha CNC | zakladanie ozubených kolies a pastorkov s UR10e
Problém vo výrobe: Stabilita procesu a fluktuácia.
Sortiment výroby na CNC sa mení niekoľko-krát za zmenu. Rýchly takt výroby. Každých pár mesiacov 3-mesačné zaúčenie novej obsluhy a s tým späté nezhody vo výrobe. V prekrytom čase je potrebná koncentrácia na meranie, obslužné činnosti, nastavovanie.
Robotizáciou sa podarilo celý proces stabilizovať, minimalizovať výkyvy a lepšie predvídať výstupy z výroby. Universal robots UR10e tentokrát nie je používaný čisto v kolaboratívnom režime. Je však pre užívateľov jednoducho použiteľný. Sami si vedia po jednoduchom zaškolení vytvárať modifikácie programu, presúvať robota do vhodných polôh pre prípady údržby a podobne.
Zadanie: 2 rodiny výrobkov – pastorky a ozubené kolesá.
Ozubené koleso s váhou cca 1,1 kg. Najväčšie majú cca 1,8kg (rôzny priemer / šírka)
Celkovo cca 140 typo-rozmerov – materiálovo od 0,1kg po 1,8kg/kus. V prípade ozubených kolies vždy nanovo pretáčané čeluste sústruhu. Potreba dokonalého, kolmého upnutia „na čelo“ do čelustí. V prípade pastorkov s odlišným upínaním – rôzne priemery / dĺžky.
Pastorky – na obrázku je jeden z najmenších predstaviteľov v sortimente
Výsledok: 2 programy kolaboratívneho robota UR10e
S kontrolným mechanizmom správnosti upnutia grippra. Vytvorili sme aktívnu komunikáciu kolaboratívneho robota UR10e s CNC systémom stroja. V prípade ozubených kolies sú programy generované automaticky. V prípade úplne nových programov pastorkov sú upravované 2 traťové body v priebehu niekoľkých minút.
Odoberanie pastorku kolaboratívnym robotom UR10e
Force senzor kolaboratívneho robota Universal robots UR10e
Tradičný prístup programovania hovorí buď o absolútnom alebo parametrickom programovaní všetkých typov výrobkov. Avšak v tomto prípade sa miesta odobratia nového dielu aj uloženia a odobratia hotového s každou dávkou mierne menia.
Ozubené kolesá | pomocou relatívnych pohybov a silového senzora
Väčšinu uzlov programu sme vyriešili pomocou silového senzora (hmatu) a relatívnych pohybov robota. Cobot UR10e pár cm pred odobratím kusu z prípravku (na základe pokynu od snímača v automatickom móde a snímača+obsluhy v poloautomatickom nastavovacom móde) spomalí a priblíži sa citlivo ku kusu, ktorého sa dotkne. Prípravky sú určené pre rodinu dielov a tým pádom majú mieru voľnosti. Počas pohybu smerom k stroju využívame gravitáciu pre presné uchytenie gripprom.
Pri odoberaní zo skľučovadla (čeluste a poloha sa menia s každou dávkou) zopakujeme rovnaký postup. Dotyk. Ústup 2mm. Uchytenie gripprom. Pokyn stroju na otvorenie skľučovadla. Odobratie.
Obdobne pri zakladaní. Tu bol však problém s presným dosadnutím na čelo. Pri odlaďovaní dochádzalo po čase k chybe na úrovni 0,01° prípadne až 0,05°. Vyriešené adaptívnym mechanickým dotláčacím mechanizmom.
Pastorky | rýchla SMED výmena grippra robota
Pri prestavení výroby stačí pomocou rýchlovýmenného systému do 1 minúty manuálne zmeniť gripper (systém výmeny nástrojov má integrované prepojenia pneumatiky aj senzorov). Technológ/obsluha zoradí sústruh. Pri spustení programu pastorky si len vyberie príslušný kód výrobku. Prípadný nový výrobok v sortimente technológ pridá len jednoduchým pridaním koncových traťových bodov v priebehu pár minút.
Bezpečnosť aplikácie a kolaboratívny robot
Bauer patrí pod americký koncern Altra Industrial Motion. S mimoriadnym dôrazom na bezpečnosť. Robot sa nachádza v úzkom priestore medzi dvomi strojmi. Po diskusii o použití, potrebách a limitáciách sme došli k záveru použiť pevné ohrady, svetelné závory a bezpečnostné rohože.
Používame však aktívne ostatné benefity novej generácie robotiky: jednoduchosť, prehľadnosť a intuitívnosť programovania. Technológovia si pred samotných zaškolením prešli zdarma online Universal robots Academy. Je úžasné sledovať, ako si aj obsluha robota (napríklad 2 ľudskí Milanovia pracujú s našim robotickým Milankom) zvykla v prípade nastavovania stroja robota jednoducho chytiť a premiestniť kde treba. Nebáť sa použiť jednoduché funkcie.
2 módy používania robotického pracoviska
Pri CNC stroji je potrebné správne odladiť proces. Jednoduchým podržaním multifunkčného tlačítka si obsluha mení režim z poloautomatického na automatický a naopak. Pri poloautomatickom robot naberie nový kus až po stlačení tlačítkom (po premeraní kusu a korekciách v stroji). Pri automatickom mu stačí pokyn od prítomnostného senzoru a neprítomnosť končatiny v malej svetelnej závore.
Kolaboratívne roboty UR pomáhajú Xiamen Runner Corp. prostredníctvom 64 cobotov dosiahnuť flexibilnú výrobu
V skratke:
Jeden z najväčších svetových výrobcov kúpelňových doplnkov a auto súčiastok, Xiamen Runner Industrial Corporation z Číny, nainštaloval 64 UR kolaboratívnych robotov aby zvýšil efektívnosť procesu výroby vytvorením vysoko efektívnej, flexibilnej a spoľahlivej výrobnej linky. UR roboty sú nainštalované na 10 rozličných aplikáciách od obsluhy vstrekolisu na plasty, cez kontrolu komponentov po záverečnú montáž.
Výzva:
Pred nasadením UR robotov bola väčšina činností v Runner Corporation manuálna a únava operátorov predstavovala risk pre bezpečnosť, kvalitu a množstvo produkcie. Spoločnosť sa rozhodla vyvinúť vysoko-efektívnu, flexibilnú a spoľahlivú výrobnú linku.
„Naším cieľom je uspokojiť potreby trhu upgradom efektívnosti výrobného procesu. Universal robots nás prekvapil s ich efektívnosťou a kvalitou, ktorá je oveľa vyššia ako u tradičných robotov“, hovorí William Xie, hlavný inžinier Xiamen Runner Corporation.
Riešenie:
Universal Robots v Runner boli inštalované, nastavené a zapojené do výroby rýchlo:
„S UR, sa môže nový projekt nasadiť a spustiť do týždňa, zakiaľčo trvá aj 6 mesiacov pripraviť tradičného robota“, hovorí Yiping Chen, manažer automatizácie v Xiamen Runner Corporation.
S flexibilnými kĺbmi a kompaktnou veľkosťou, roboty môžu pracovať v tandeme, deliac sa o pracovný priestor a v obmedzených prostrediach. Ďalšou inováciou v Runner je rozšírenie dosahu a efektívnosti cobotov UR ich osadením na koľajnice, eliminujúc potrebu posunúť už ukotvené stroje zakiaľčo podporujú multi-stanicovú prevádzku.
Zakiaľ čo pred-vkladá súčiastku, jeden robot môže obsluhovať tri vstrekolisy. So šesť-gripperovým nástrojom namontovaným na flexibilnom zápästí môže robot rýchlo prechádzať medzi jednotlivými nakladacími pozíciami.
„Kolaboratívny robot je mocnou inováciou v priemyselnom výrobnom sektore, umožňujúci automatizovanú produkciu s bezprecedentnou flexibilitou“, hovorí pán Xie.
Roboty UR vykonávajú montáž produktu tak, že zoberú orech z vibračného disku a vložia ho do stanoveného bodu, zoberú súčiastku na opracovanie a nakoniec odoberú zmontované produkty. Úloha prekladania pick-and-place je vykonávaná s pomocou vision systému presne lokalizujúceho súčiastky. Vision senzory lokalizujú objekt a údaje o ňom na dopravníkovom páse a presne nastavia uchopenie nádne položených objektov gripperom.
Runner zaznamenal strmý nárast výkonnosti produkcie výroby odkedy nasadil UR roboty, zakiaľ čo nasadenie zamestnancov na iné pozície efektívne pomohlo vyriešiť problémy s nedostatkom zamestnancov.
„Roboty sa vyvíjajú a široko nasadzujú a automatizácia už viac nebude asociovaná s masovou výrobou štandardizovaných produktov. Automatizované výrobné linky umožnia produkovať malé dávky rozličných customizovaných produktov. Veľmi pozitívne vnímam budúcnosť Universal Robots“, hovorí pán Xie.
Kolaboratívni roboti v automobilovom priemysle
Dejiny robotiky boli odjakživa úzko späté s automobilovým priemyslom. Spoločnosť General Motors ako prvá nasadila v roku 1962 priemyselného robota. Od roku 1970 sa už rozsiahle robotické systémy vo výrobných linkách využívali masívne. Až doteraz. Automobilový priemysel totiž prechádza veľkými zmenami.
Aký je dnešný trend? Zvyšuje sa dopyt po autách upravených podľa prianí zákazníkov. Objemy jednotlivých sérií sa znižujú. Pre výrobcov automobilov a ich dodávateľov to znamená, že musia byť stále pripravení na zmeny.
Práve preto má hneď vedľa efektivity a precíznosti svoje miesto aj flexibilita, ktorá sa stala v priemysle kľúčovým faktorom. Avšak flexibilita nie je typickou vlastnosťou priemyselných robotov, pevne stojacich na zemi, obklopených bezpečnostnými zábranami a naprogramovaných na jedinú činnosť. Z tohto dôvodu sa výrobcovia čoraz viac zameriavajú na využitie kolaboratívnych – flexibilných mobilných robotov.
Továreň budúcnosti: modulárna, mobilná a flexibilná
Jednou z nich je automobilka Audi: na udalosti „Tech Day Smart Factory“, ktorá sa konala v centrále spoločnosti, v nemeckom meste Ingolstadt, Audi predstavila nový výrobný koncept. Ten sa výrazne líšil od klasickej montážnej linky. Linka je modulárna a mobilná, aby dokázala čeliť zložitosti a rozmanitosti nových produktov a neustálej potrebe začleniť do výroby nové a nové procesy.
Okrem AGV („automatic guided vehicles“ – mobilný robot, automaticky riadené dopravné zariadenie, ktoré sa pohybuje podľa značiek alebo vodičov umiestnených v podlahe) majú vo vízii budúcnosti továrne nezastupiteľné miesto aj ľahkí flexibilní roboti od Universal Robots.
Audi: využitie kolaboratívnych robotov
Ergonomicky náročné úkony prenechajte robotom
Flexibilita sa nepochybne stáva pre výrobcov čoraz podstatnejšia. Nie je však jediným dôvodom, prečo si popredné automobilové spoločnosti volia do svojich výrob kolaboratívnych robotov. Možnosť nahradiť človeka, ktorý má fyzicky namáhavú a zdraviu škodlivú prácu, je tiež významným faktorom. Indická spoločnosť Bajaj Auto Ltd., tretí najväčší výrobca motocyklov na svete, veľmi rýchlo pochopila, odkiaľ fúka vietor. V roku 2010 sa rozhodla zamerať na štandardizáciu výrobných procesov a zautomatizovanie manuálnych činností, ktorých je vo výrobe stále množstvo.
„Montážna linka na výrobu dvojkolesových vozidiel je rozmerná, vyžaduje veľké množstvo pracovníkov, ktorí vykonávajú fyzicky namáhavú a precíznu prácu“, vysvetľuje Vikas Sawhney, generálny riaditeľ sekcie inžinierstva (robotika a automatizácia) spoločnosti Bajaj. Práve z týchto dôvodov sa rozhodli začleniť do výrobného procesu viac než 100 kolaboratívnych robotov. Pracovníci sa z toho rozhodnutia tešia: „Vďaka vysokej kvalite výstupu, ktorú dosiahnem pomocou kolaboratívnych robotov, som veľmi hrdá na svoje výkony,“ hovorí Rameshwari, operátorka výrobnej linky spoločnosti Bajaj. „Ovládať tieto pokročilé technológie je pre mňa zaujímavé a zároveň jednoduché, práca už viac nie je tak fyzicky náročná. Ja a aj ostatné pracovníčky s týmito robotmi rady pracujeme.“
Nissan Motor Company je podobný prípad – pracovníci starnú, strácajú dôležité zručnosti. Jedným z problémov veľkokapacitného závodu v Jokohame bolo prekročenie doby cyklu konkrétneho procesu, museli byť preto nasadení zastupujúci pracovníci. Výsledok? Vyššie náklady na pracovné sily a personál pre Nissan. Riešením bolo nainštalovať robotické ramená UR10. Prekračovanie času jednotlivých cyklov je už minulosťou, pracovníci navyše už nemusia zdvíhať ťažké kusy – to je už úloha kolaboratívnych robotov.
Nielen výrobci, aj dodávatelia sa spoliehajú na kolaboratívnych robotov. Ku príkladu, jeden z najväčších dodávateľov prístrojových dosiek automobilov, španielsky Continental Automotive, má v súčasnosti nainštalovaných 6 kolaboratívnych robotov a inštalácia ďalších troch UR10 je v projektovej fáze.
Veľké nadnárodné spoločnosti však nie sú jediné, ktoré sa snažia o „kobotizáciu“ výroby. Kolaboratívni roboti si nachádzajú svoje miesto aj na montážnych linkách v oveľa menších podnikoch.
Zdroj: www.universal-robots.com
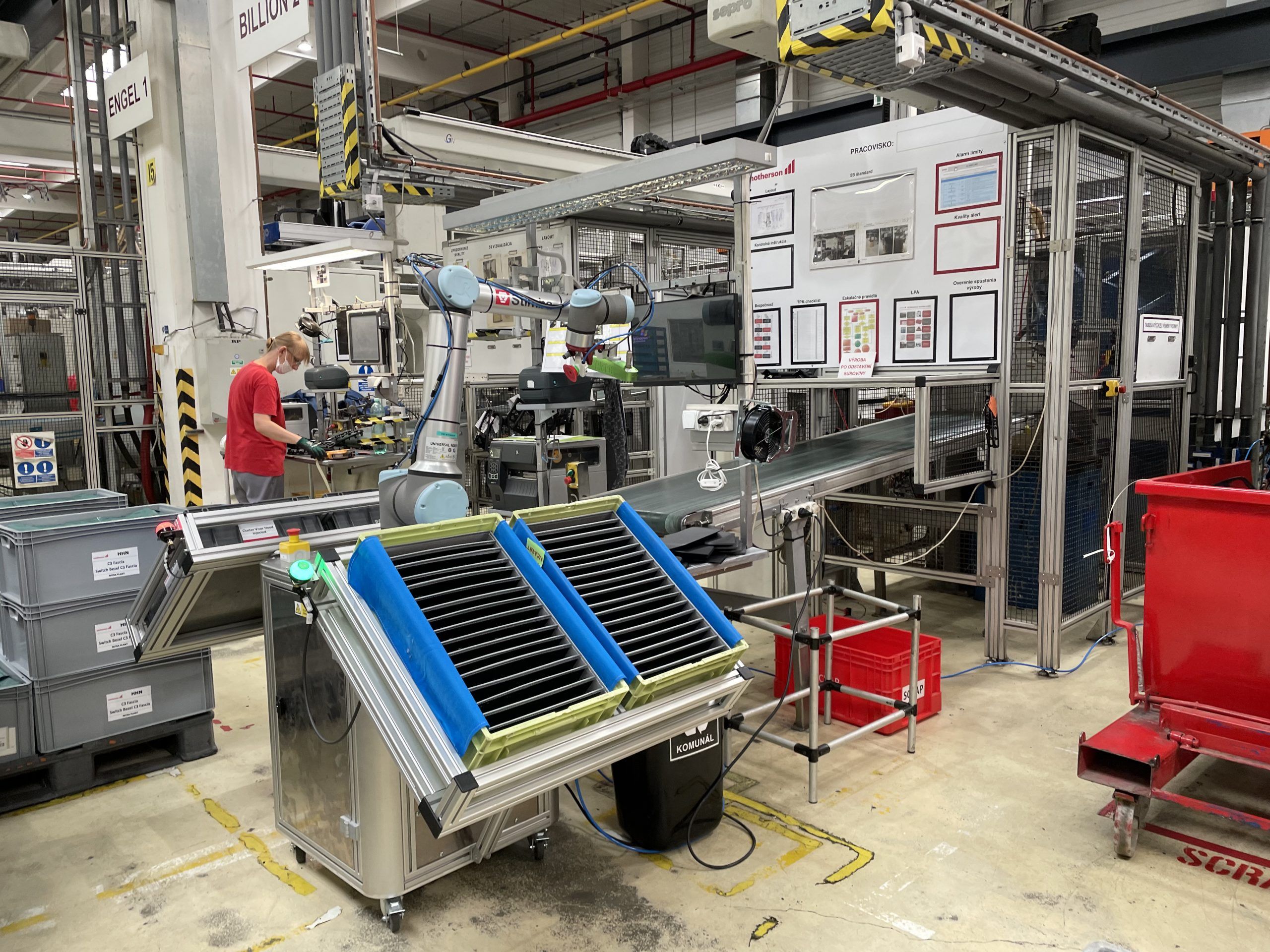
Projekt montážnej linky Dometic s pokročilým riadením Siemens S7
V marci sme dokončili zaujímavý projekt pre Dometic Slovakia. Dometic je významným svetovým výrobcom vybavenia karavanov – od špeciálnych drezov so zabudovanými plynovými spotrebičmi po špeciálne chladničky a mrazničky.
Východisková situácia. Mali sme za úlohu automatizovať súčasnú montážnu linku „teplého programu“, skrátiť cyklové časy, znížiť chybovosť a tým zmätkovitosť a v neposlednom rade zvýšiť komfort obsluhy. Do času zavedenia linky používala spoločnosť KANBAN systém s manuálnym posúvaním montážnych vozíkov/stolíc medzi 16 stanovišťami (tzv B linka). Zároveň s montážou na hlavnej linke prebiehala aj predmontáž plynových agregátov (tzv A linka) kde pracovali 4 operátori pričom každý realizoval kompletnú predmontáž agregátu. Neboli zavedené elektronické kontrolné mechanizmy a prepojenie jednotlivých operácií so systémom. Takt linky bol veľmi nestabilný (cca 80 sekúnd) – závislý od človeka – ľudský faktor rozhodoval o tom či presun bude trvať 10 alebo 30 sekúnd, za aký čas sa operátor vráti na miesto a podobne. Jediná forma automatizácie bolo trúbenie majáku určujúceho o 5 sekúnd posunutie vozíkov pracovníkmi.
Spolupráca. Konštrukčno-vývojový tím Stimba a tím Dometic spolu vytvorili nový koncept posúvajúci výrobu do súčasného stavu. Využili sme osvedčené montážne postupy, Kanban, usporiadanie pracovísk Dometic. Pridali sme však mnoho prvkov automatizácie, vizualizácie, kontroly, vyhodnocovania, štatistík, uchovávania dát na základe automotive štandartov vyvinutých v spolupráci s STU BA.
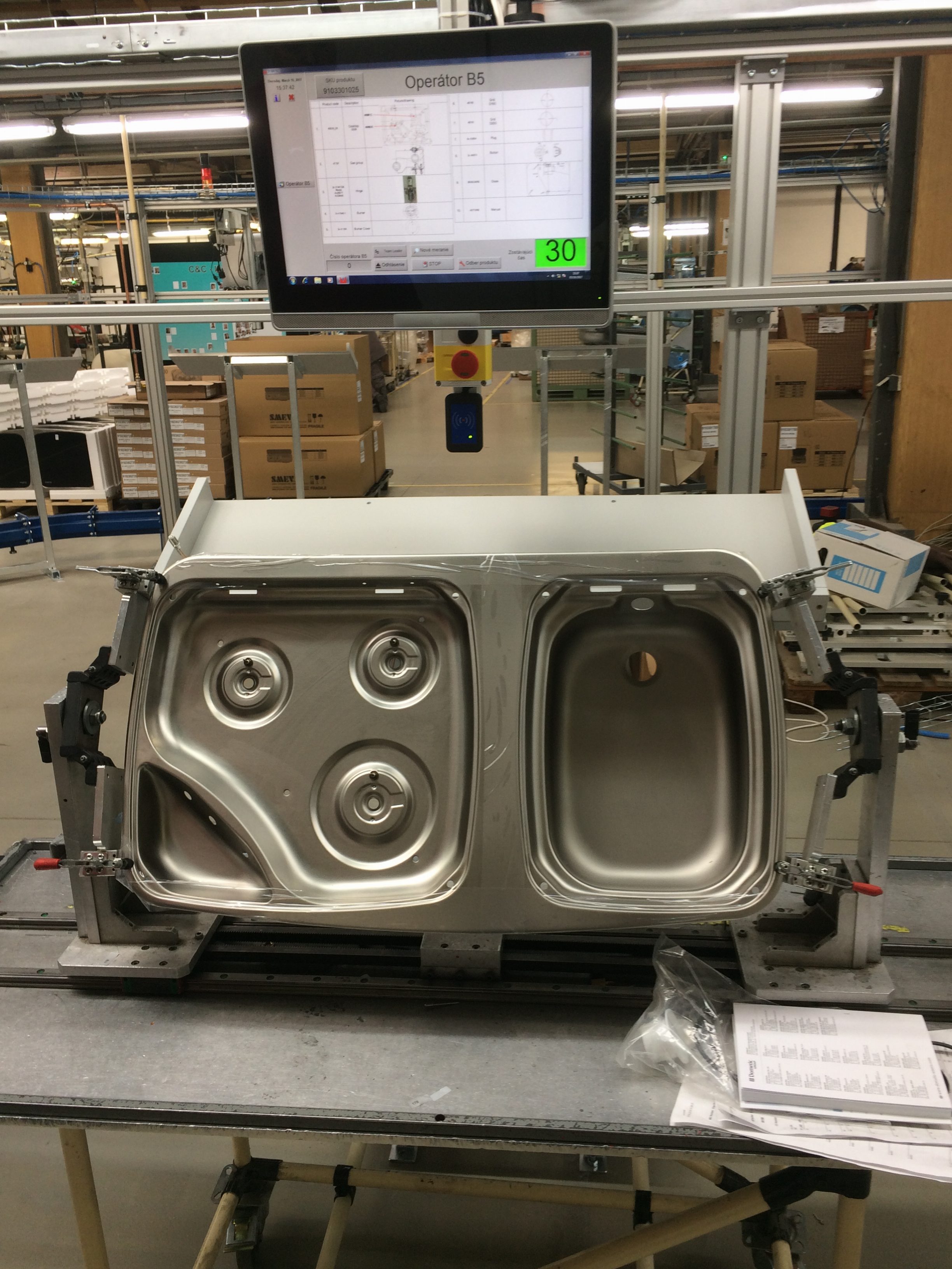
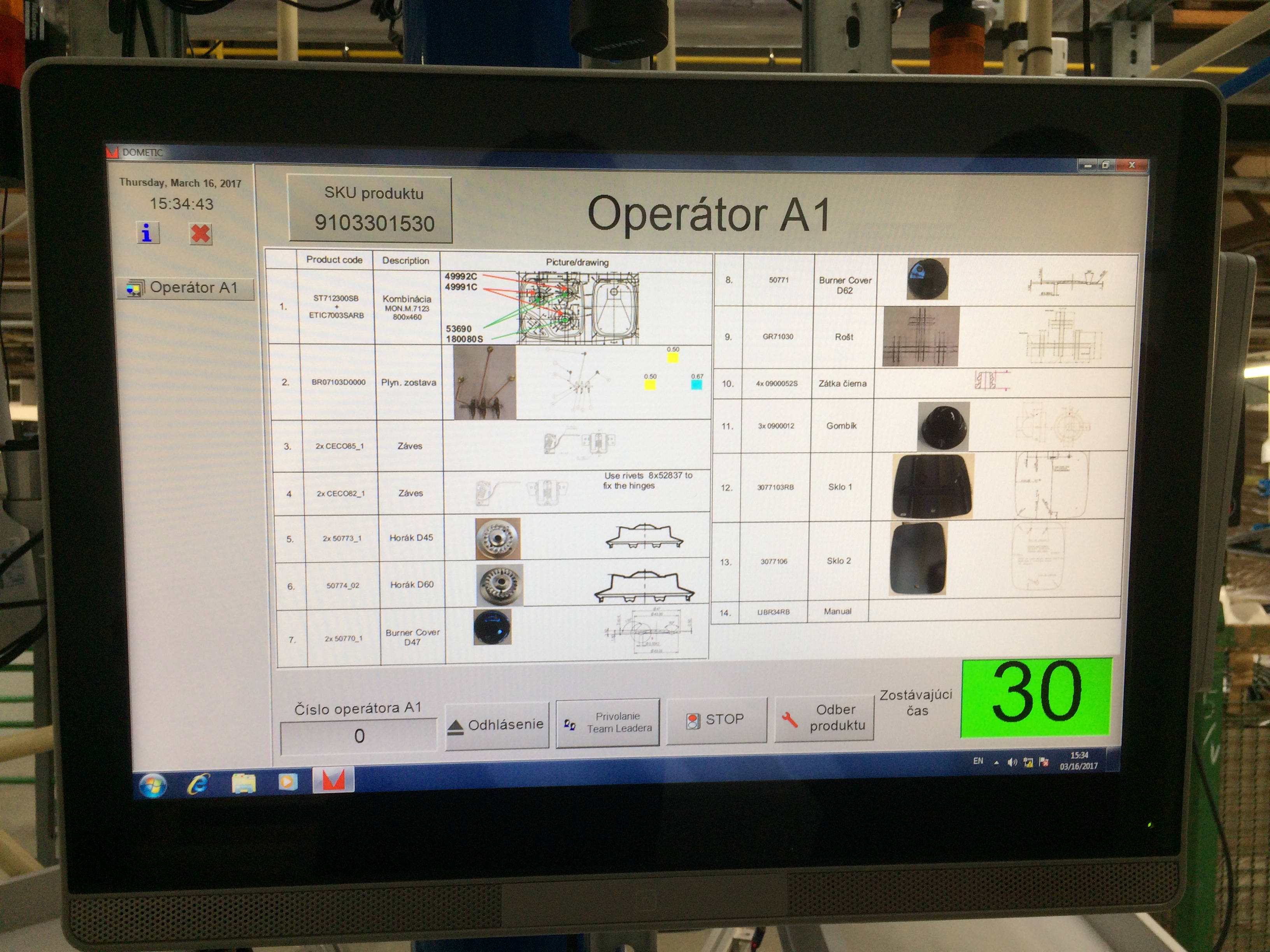
Riešenie. Vytvorili sme kostru pracoviska B linky s reťazovým trakčným systémom. Doplnili sme existujúce montážne vozíky o unášače a napojili ich na centrálny informačný systém. Linka umožňuje vyrábať naraz viacero druhov výrobkov, či ich modifikácií. Každý výrobok si so sebou nesie čiarový kód. Po nasnímaní sa operátorovi objaví presný pracovný postup. Automatický systém upozorňuje operátora na zostávajúci čas taktu, umožňuje mu vizuálne a zvukovo požiadať o asistenciu teamleadera, odobrať vadný produkt z linky či v prípade potreby linku zastaviť.
Predmontáž so 4 operátormi bola vybavená automaticky ovládaným otočným stolom, pričom postup predmontáže bol rozdelený na 4 jednoduchšie úkony čo umožnilo skrátiť takt A linky. Obe linky (A linka aj B linka) pracujú nezávisle čiže dočasné zastavenie jednej linky neovplyvní plynulosť chodu druhej aj vďaka gravitačnému zásobníku agregátov medzi linkami.
Zadávanie objednávok je realizované team leaderom z jeho pracoviska pričom sa automaticky načíta číslo produktu aj s plánovaným počtom kusov a operátorom A linky sa zobrazí postup montáže na dotykovej obrazovke.
V súčasnosti je takt linky 60s u zložitejších produktov, jednoduchšie produkty sú vyrábané s taktom 45s čo oproti pôvodným 80s je výrazné zlepšenie.
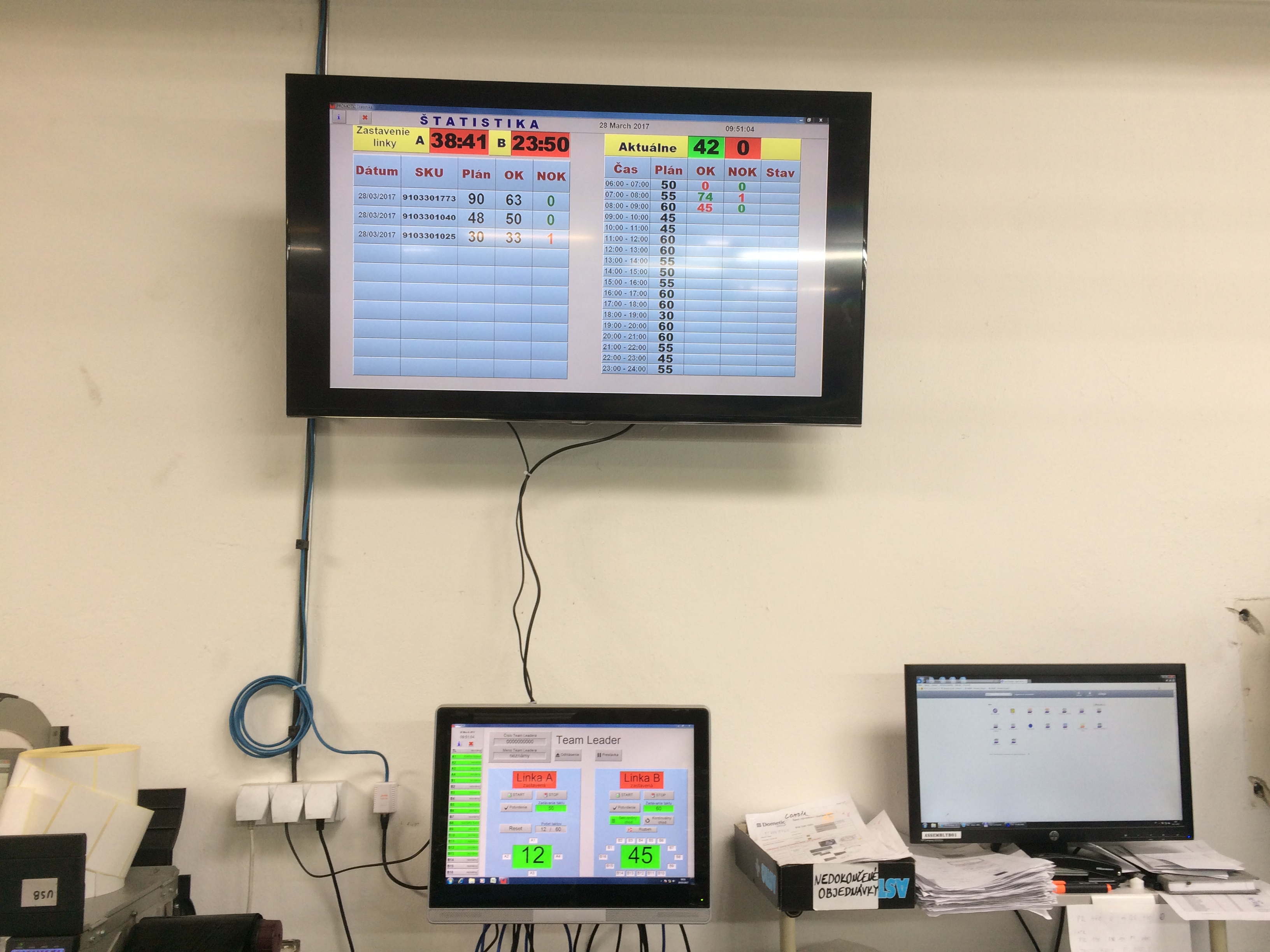
Štatistika. Každé pracovné miesto a operátor (prihlásený k pracovisku čipovou kartou) sú kontrolovateľné. Objektívne umožňuje vyhodnocovať výkonnosť celej linky (A + B spolu) a zároveň vyladiť množstvo operácii na linke.
Štatistika umožňuje počas celého dňa sledovať na základe výrobných čísel koľko OK kusov, NOK kusov sa vyrobilo z jednotlivých druhov výrobkov a aký bol plán. Zároveň vyhodnocuje koľko kusov OK a NOK výrobkov sa vyrobilo za každú hodinu a na základe stanovenej normy vyhodnocuje percentuálnu výkonnosť linky.
V ďalšom kroku bude nasadené sledovanie typov závad a ich vyhodnocovanie počas každej hodiny, či smeny. Údaje môžu byť opcionálne vyhodnotené v databázovom systéme, alebo v exceli.