Pickit je softvér, vďaka ktorému dokážete pomocou Vášho robota uchopovať rôzne boxy, diely, alebo predmety. Pickit navádza Vášho robota s použitím 3D kamery, ktorá zisťuje koordináty vyhľadávaných dielov.
Produkty
V závislosti od potrieb aplikácie robota rozdeľujeme viacero možností s rozdielnymi možnosťami a schopnosťami. Navrhneme Vám presne tú pravú určenú pre Vás, aby bol pomer cena/výkon čo najlepší v prospech zákazníka.
Pickit L
Kamera s 3D videním , ktorú je možné vďaka svojmu veľkému zornému poľu využiť pre takmer všetky úkony. Dokáže vyhľadať, rozoznať a naviesť robota k dielom s minimálnymi rozmermi 50x50x10 mm. Kamera má rozlíšenie 640×480 px a ponúka najlepší pomer cena/výkon. Technické špecifikácie

Pickit M HD
3D kamera, ktorá ponúka rozlíšenie 1920 x 1200 a je konštruovaná na vyhľadávanie malých dielov a tomu je prispôsobené aj zorné pole. Oproti Pickit L ponúka podstatne vyššiu presnosť, ktorú využijete práve pri odoberaní dielov s malými rozmermi. Technické špecifikácie
Pickit L HD
Kameru Pickit L HD je ideálne používať pri obdobných situáciách ako Pickit L, avšak táto kamera dokáže pracovať s oveľa zložitejšími tvarmi dielov, alebo problematickejšími materiálmi, resp. všade tam, kde možnosti a presnosť Pickit L nie sú dostačujúce. Poskytuje rozlíšenie 1920 x 1200 a využitie nájde rovnako aj tam, kde vzdialenosti robota k miestam odoberania odkladania sú vyššie, ako obyčajné. Technické špecifikácie

Aplikácia
Pickit nájde využite všade tam, kde je potrebné vyhľadať diely, ktoré sa nenachádzajú vždy v exaktnej pozícií. Dokážeme takto riešiť odoberanie dielov z výrobnej linky, dopravníkového pásu, alebo iných modulárnych systémov bez toho, aby sa robot musel učiť presné súradnice. Predchádzame tak problémom ako neodobratie dielu, pokiaľ sa zmení jeho pozícia z akéhokoľvek dôvodu.
Pickit pracuje s kamerou, ktorá môže umiestnená stacionárne, alebo na robotovi. Pre každé využitie robota riešime aplikáciu a umiestnenie individuálne vzhľadom k potrebám zákazníka.
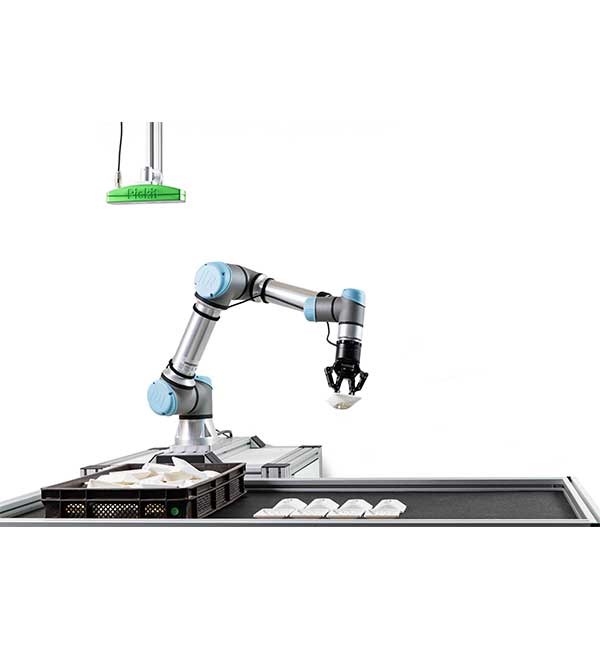
Odoberanie so stacionárnou kamerou 
Odoberanie s kamerou na robotovi
Nastavenie
Pri aplikácii tohto riešenia nie je potrebné programovanie, nakoľko všetky nastavenia sa vykonávajú priamo v užívateľskom rozhraní Pickit-u, ku ktorému sa dostane jednoduchým pripojením ethernet káblu ku svojmu počítaču. Program je je správne fungovanie potrebné naučiť 3 veci:
Kde?
Nastavujeme oblasť, v ktorej sa bude diel vyhľadávať. Program vyhľadáva len v rámci tejto oblasti.
Čo?
Diel, ktorý bude vyhľadávaný, vieme program naučiť pomocou importovaním CAD modelu, alebo metódou Teach-in, kde kamera zosníma objekt a použije ho pre porovnávanie.
Ako?
Každý diel musí mať nastavení tzv. „pickpoint“. Do tohto bodu bude nasmerovaný robot, aby diel odobral. Vieme prispôsobiť ako miesto, tak aj uhol, pod ktorým bude diel odoberaný pre jednotlivé aplikácie robota.
Ďalšie nastavenia
Ďalšie nastavenia zahŕňajú stanovenie minimálnej zhody, kedy bude diel identifikovaný a odobraný. Správnym nastavením dokážeme vyriešiť aj nepriaznivé svetelné podmienky v okolí tak, aby detekcia aj naďalej zostala ideálna. Rovnako vieme prispôsobiť aj čas detekcie, pokiaľ potrebujeme dosiahnuť určitý cyklus čas a času nie je „na rozdávanie“.
Spolu so správnym nastavením robota, rýchlosťou a typmi pohybov dokážeme zabezpečiť ideálne riešenie v akejkoľvek výrobe kde sa diely vyrábajú cyklickým procesov a pomocou „Pick and place“ dokážeme nahradiť prácu operátora. Ideálne využitie toto riešenie nájde napríklad pri obsluhe vstrekolisov, kde sú pevne stanovené cyklus časy a diely je potrebné odobrať z dopravníkového pásu a paletizovať.
Robot dokáže diely odobrať, dokonca rozlíšť nezhodné diely vďaka použitiu minimálnej zhody. Takýmto spôsobom vieme odhaliť základné chyby ako nedoliatky, pokiaľ nám okolité podmienky a ďalšie nastavenia, rovnako ako technické vybavenie dovoľujú nastaviť vysokú mieru požadovanej zhody, na 90-95 %. Týmto riešením robot nezhodný diel neodoberie, nakoľko požiadavka na minimálnu stanovenú zhodu nebude splnená.
Aplikovanie v programe Universal Robots
Nakoľko všetky nastavenia sú riešené priamo v Pickit-e, v programe UR vyberáme len trasové body ako body odoberania dielu, bod pred a po odobratí a premenné, či diel bol odobratý, alebo nájdený. V programe definujeme aké diely a v akej oblasti vyhľadávame. Preto pri tvorbe nového programu, alebo zmene prostredia, je prispôsobenie programu veľmi jednoduché.